|
Observed
Circulation in Upper West Passage of Narragansett Bay, Sept
2013
[ Survey location and context for following
figures described in Deployments.
]
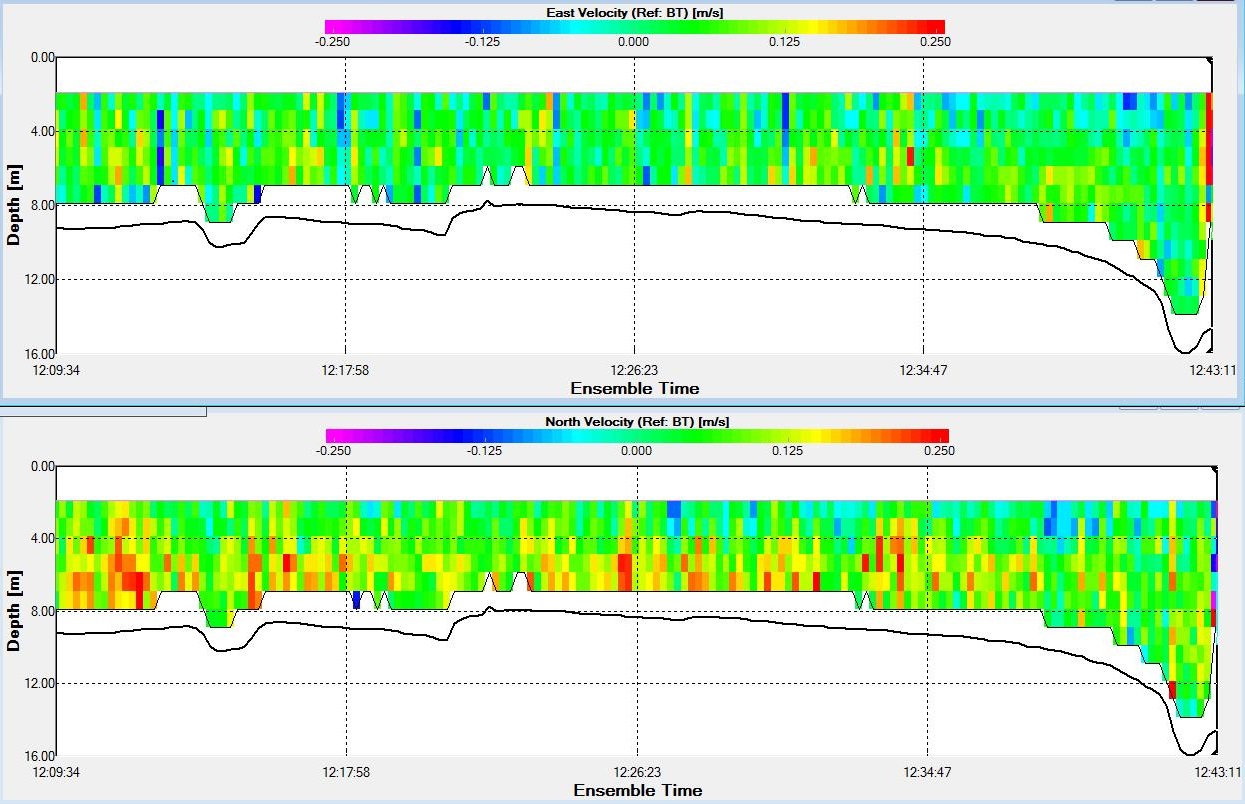
Figure
1. Water velocity profile measurements by ADCP on SCOAP
during ~35 minute late flood period,
when transiting 4km east-west transect (shown in Deployments) eastward at ~4-5 knots.
Transects such as the two shown here (Figs 1 & 2) were
collected each half hour for a period of about 10 hours. Upper
frame: Eastward velocity. Lower frame: Northward velocity.
Scale: red positive 25 cm/s, violet negative 25 cm/s.
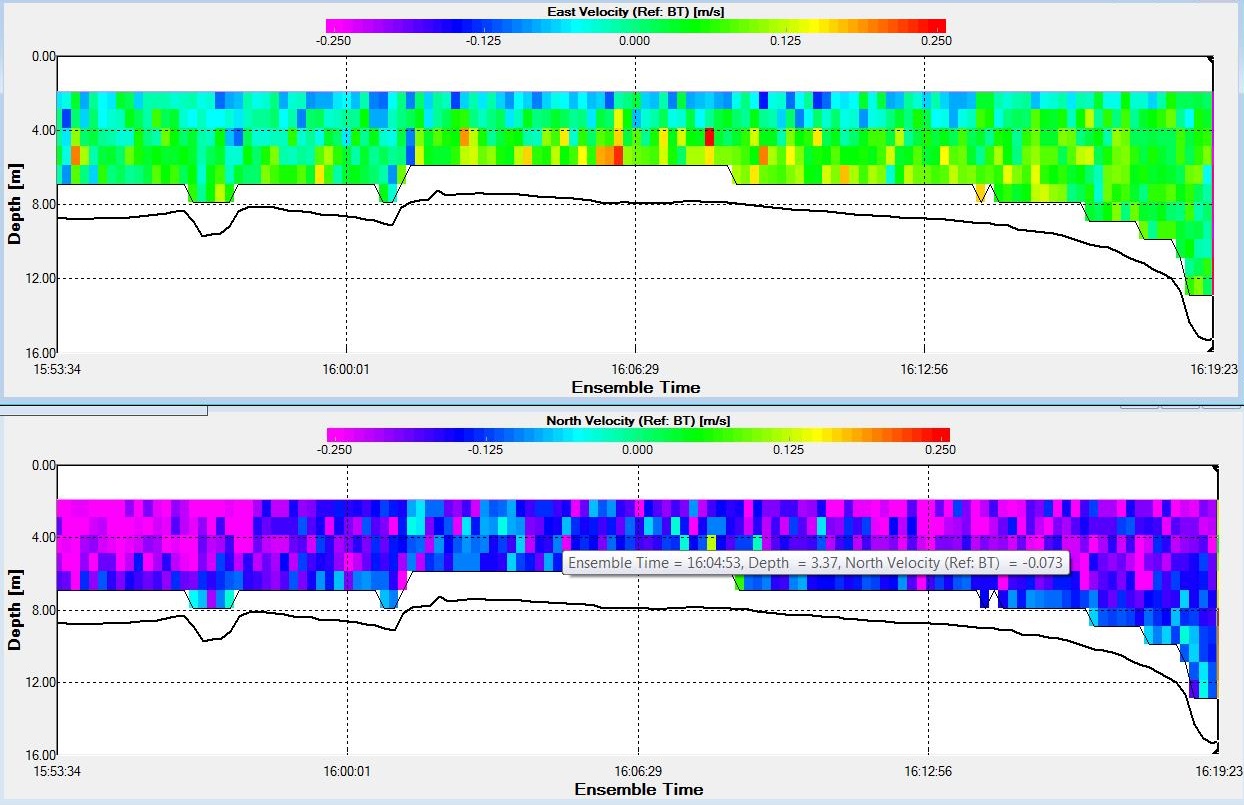
Figure 2. Same as Fig.
1, but ~4 hours later, during peak
ebb. The northward velocity has become strongly
negative, indicative of southward-directed ebb flow.
Presentations
and publications
Filimon, M.A. and D.L. Codiga, 2016: An AIS-Based Site Planning Method
to Help Minimize Collision Risk during Marine Autonomous Surface Craft
Deployments. J. Atmos. Oceanic Technol., 33, 12511255,
https://doi.org/10.1175/JTECH-D-16-0052
Codiga,
D.L., 2015. A Marine Autonomous Surface Craft for
Long-Duration, Spatially Explicit, Multidisciplinary Water
Column Sampling in Coastal and Estuarine Systems. J. Atmos.
Oceanic Technol., 32, 627–641. doi:
http://dx.doi.org/10.1175/JTECH-D-14-00171.1
Codiga, D.L, 2013. An Autonomous Surface Craft
for Long-Duration, Multi-Disciplinary Sampling in Coastal and
Estuarine Systems: Initial SCOAP Field Results. Mid-Atlantic
Bight Physical Oceanography and Meteorology Conference,
Narragansett, RI.
Nehra, A and D.L. Codiga, 2013. Networked
Utilities for Reliable and Safe Transfers of Control Between
Native Mission Software and Backseat MOOS-IvP Helm on an
Autonomous Surface Craft. Mission Oriented Operation Suite
Development and Applications Working Group 2013, Massachusetts
Institute of Technology, Cambridge, MA.
Filimon, M.A. and D.L. Codiga, 2013. MOOS-IvP
Helm Based Simulations of Collision Avoidance by an Autonomous
Surface Craft Performing Repeat-Transect
Oceanographic Surveys. Mission Oriented Operation Suite
Development and Applications Working Group 2013, Massachusetts
Institute of Technology, Cambridge, MA.
Filimon,
M. A., 2013: Site planning and on-board collision avoidance
software to optimize autonomous surface craft surveys. M.S.
Thesis, University of Rhode Island, Dept. of Ocean
Engineering, 62 pp.
|


