|
How it works The catamaran has fiberglass hulls about 11 m (36 ft) long and beam about 5 m (17 ft). The relatively large size is driven by the need to be sufficiently seaworthy in open coastal waters where heavy seas can occur. Because the target duration for unattended deployments is up to a month at a time, the hull design was selected for hydrodynamic efficiency. There is a fixed electric thruster in each hull. A hybrid diesel generator and battery system powers the thrusters, and steering is by differential thrust. The target average speed is 5 knots; during calm-water tests, top speed exceeded 8 knots. The navigation system will be in frequent contact, by satellite communications (Iridium), with an onshore control center at URI at all times. The path navigated (in general, a pre-designated fixed transect between two points; see "Where and when..." below) will be determined by on-board autonomy software but guided from, and monitored by, the control center.  Schematic design drawings
(side and plan views). The tri-mast superstructure (for
mounting various antennae) hosts red-over-white-over-red
all-round lights at 4, 3, and 2 m above the gunwale as
required by the USCG for unmanned surface crafts.
International Code Flag D (blue band, yellow field) rigid
replicas 1-m high, also required by the CG to indicate
"maneuvering with difficulty", will be mounted on each hull
(45o, plan view).
As expected of any other similarly-sized vessel, SCOAP is equipped with a full complement of safety and communications systems. This includes lighting and markings that comply with Coast Guard guidelines for unmanned vessels, and active and passive radar reflectors. At least as importantly, it also includes an Automatic Identification System (AIS) transceiver, to detect other AIS-equipped vessels as well as alert them to SCOAP. An automated system on board SCOAP will modify its course and speed for collision avoidance, as needed based on detection of other AIS-equipped vessels. Future enhancements for SCOAP include augmenting the collision avoidance system to incorporate automated detection of other vessels (in particular those not equipped with AIS) using radar.   (Left) Hull profile views: front of port hull, rear of starboard hull. (Right) Thruster propeller and debris-shedding skeg, starboard hull. Photos: Jim Fontaine, Exeter Science Services. Certain features are being designed and implemented by URI scientists; most were designed and built by SeaRobotics Corporation (www.searobotics.com) with guidance from URI. Where and when will it operate? Unattended operations will occur at sites that are planned with the US Coast Guard. SCOAP will be escorted to and from these sites by an accompanying vessel, and left unattended only at the designated site. The initial operating concept is that, once deployed, SCOAP will move repeatedly along a specified sampling line, or transect. In effect it will act as a "mobile buoy" that travels back and forth between the two transect endpoints. The locations of designated transects, and dates of deployments, will be publicized through the Notice to Mariners published by the Coast Guard, as well as here at this website. A series initial field tests at inshore sites is leading up to the long-term goal of a month-long unattended deployment on a transect about 15-20 km (9-12 miles) long in southeastern Rhode Island Sound. What observations will it collect? Presently an acoustic Doppler current profiler (ADCP), which collects vertical profiles of water currents, is installed. These observations are needed to improve our understanding of circulation patterns and better quantify water transport rates. 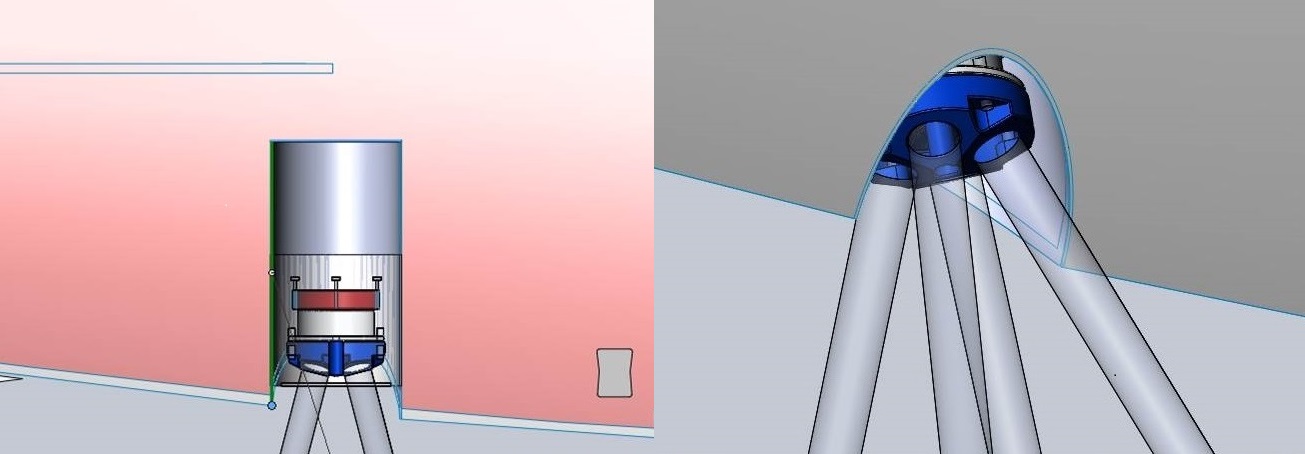 ADCP mounted in port hull. Renderings: Geoff Douglass, Searobotics. The long-term goal, as sufficient operational safety and seaworthiness in long duration deployments are demonstrated, is to equip SCOAP with a broad range of sensors for interdisciplinary oceanographic studies. This includes a winched profiling system to collect water column profiles of physical, biological, chemical, and optical water parameters. Such profiles (together with the current observations) will address the crucial and largely unmet need for direct measurements of material transport, and how it varies geographically and with depth below the water surface. There is also potential for towing equipment, for example geophysical sensors such as sidescan sonar. In this way SCOAP is intended to be a general platform that enables improved sampling for all sub-disciplines of oceanography, thus facilitating more effective cross-disciplinary collaborations. |


