|
UPPER WEST PASSAGE, NARRAGANSETT BAY, SEPT 2014: BACKSEAT AUTONOMY SOFTWARE, TRI-MAST HOSTING LIGHTS AND ANTENNAE, AND IRIDIUM COMMUNICATIONS TEST
SUMMARY. The focus of this deployment was (a) implementation of the third-party open-source "backseat" autonomy software MOOS-IvP (Mission Oriented Operating Suite, Interval Programming), (b) shake-down of the tri-mast superstructure, and (c) tests of the low-bandwidth Iridium communications system. There were nearly three full days of daylight operations attended by an escort skiff with WiFi/Radio-Frequency(RF) communications. The location was near and on the same east-west transect as the Sept 2013 deployment (see below) and wave/wind/current conditions were similar. Just as during the Sept 2013 deployment, useful observations of vertical profiles of water velocity along the transect were collected using the acoustic Doppler current profiler (ADCP). The MOOS-IvP autonomy software (moos-ivp.org) is a sophisticated system for flexible navigation control. It was installed on SCOAP in a "backseat" role, to augment the native SeaRobotics control software which provides pre-programmed fixed speed/direction, track-following, station-keeping, and waypoint sequence commands. MOOS-IvP is designed to enable custom-designed vessel behaviors that include adaptive responses to information from on-board sensors. This is a crucial need for the goal of collision avoidance, based on sensor input such as tracking of other vessels using AIS (Automatic Identification System). During this deployment, in contrast to the Sept 2013 deployment, the vessel navigation and control was under command of MOOS-IvP instead of the native SeaRobotics control software. Relatively simple behaviors were exercised, such as waypoint following, but this on-water demonstration of MOOS-IvP control culminated substantial software development, simulation, and testing efforts. It also completes an important building block making possible the goal of autonomous collision avoidance based on collision avoidance regulations (COLREGS). MOOS-IvP control has another important benefit. On-water activities were interrupted twice during this field effort, each time by a failed propeller locking pin groove. Although stopping to replace propellers and locking pins is disruptive, it is relatively straightforward and inexpensive. But the failures indicated unusually high stresses on the propellers. We surmised this was the result of the prior deployment in Sept 2013, during which the native SeaRobotics track-following navigation algorithm was active for extended periods. The standard PID (proportional-integral-differential) gain parameters in force for that algorithm were designed for calm water (harbor) conditions, thus actively correct for deviations as small as 0.5 m from the vessel track. Such deviations occurred during the great majority of that deployment, due to the sea state and wind conditions. The fixed propellers were therefore implementing course corrections by rapidly reversing direction for long periods at relatively high speeds, which would lead to excess stresses on the propeller locking pins. With MOOS-IvP active instead of the SeaRobotics algorithm, waypoint following does not involve these rapid corrections (which are in any case unnecessary for vessel track deviations as small as 0.5 m), so stresses on the propellers are greatly reduced. The tri-mast superstructure, custom designed and built at URI/GSO, performed well during its first on-water operations. Its main purpose is to host lighting and antennae. Following Coast Guard guidance for COLREGS it hosts three all-round lights-- red over white over red at 4, 3, and 2 m high off the gunwale-- in the standard "maneuvering with difficulty" configuration as appropriate for unmanned vessels. In addition to an Echomax XS-band active radar reflector and a weather station (AirMar PB-150) the tri-mast also hosts antennae for Iridium communication, RF communication, and the GPS and VHF antennae for the AIS system. Finally, the largest item the tri-mast hosts is the antenna of the satellite compass (Furuno SC-50), which provides high-accuracy heading data that improves the quality of the ADCP water velocity profile observations. The tri-mast design successfully enabled convenient and efficient assembly/disassembly and trailering of its components before and after the on-water work. Finally, an initial test of the Iridium communications capability was completed. Iridium will be necessary for unattended operation of SCOAP in offshore areas, such as the planned Rhode Island Sound site. The Iridium hardware, and software interface to the SeaRobotics control system, was functional. |
|
UPPER WEST PASSAGE, NARRAGANSETT BAY, SEPT 2013: ONE-DAY AUTONOMOUS REPEAT-TRANSECT ADCP
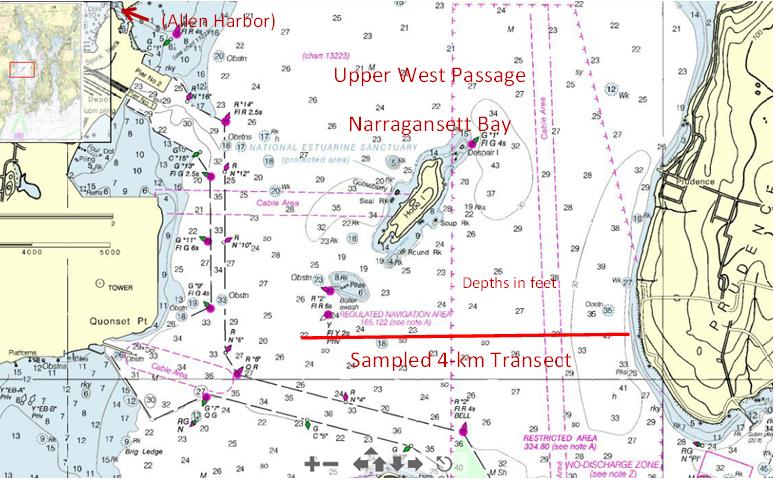
SURVEY SUMMARY. This deployment was the first ever to exercise SCOAP outside protected harbor and pond environments, exposed to wind and wave conditions that begin to approach those of open coastal waters. The site was the Upper West Passage of Narragansett Bay, on an east-west transect south of Hope Island extending 4 km from the western shore of Prudence Island, along which water depths range from about 8 to 14 m.
Chart of Upper West Passage in Narragansett Bay showing the location of the 4 km long east-west transect. Upper left shows all of bay with inset box in red. A short afternoon of on-site tests was followed by a long day of autonomous repeat-transect sampling to collect water velocity measurements using the acoustic Doppler current profiler (ADCP). During the long day, winds were typically about 5-10 knots and significant wave heights were typically about 1-2 feet; there were also periods of up to a couple/few hours at a time when the wind/wave conditions became more challenging (gusts to 15-20 knots, 2-3 feet), as well as a short period when conditions were very calm and flat. To monitor catamaran performance, it was accompanied at all times by the GSO skiff with the RF-linked control system on board. The following goals were achieved:
These results set up the anticipated next deployment well: it is currently planned to be at the same site but focus on (i) the initial on-water implementation of MOOS-IvP autonomy software on SCOAP, and (ii) the initial test of the custom tri-mast superstructure (see How it works) that will host lights expected by the Coast Guard for unmanned surface craft and provide higher mounting locations for various antennae.
Newport Bridge in background. Photo: Amit Nehra. |
|
ALLEN HARBOR, WESTERN SIDE, AUG 2013: FULL-DAY AUTONOMOUS REPEAT-TRANSECT
MISSION SUMMARY. This week-long deployment sequence was the longest period SCOAP has been on the water to date, which enabled three consecutive days of on-water operations. The site was the Western side of Allen Harbor, in a 75-100m by ~350m area about 2-3 m deep (tidal range ~2 m), on the far side of the vessel moorings and traffic. Weather was cooperative and mild with minimal winds, waves, and currents. The following goals were achieved:
 Docked at URI Educational Facility on Allen Harbor. Deployment Log. The catamaran was launched/recovered using the ramp at Mill Creek Marine. A temporary docking arrangement for the catamaran was made, with help from Fred Pease of Ocean Engineering, at the URI Educational Facility property at Allen Harbor. Mill Creek staff moved SCOAP across the harbor, with a skiff tied off stern to stern, to the docking point on the first day and back to the ramp on the final day. Three days of operations were carried out with the control station on an escort boat, a GSO maritime skiff operated by Steve Granger. The first day was a relatively short afternoon effort. SCOAP transited between the dock site and the operations area under remote control from the escort boat. Additional remote control was completed in the operations area to demonstrate that turning radii were small enough to work within the designated space. A short mission between two waypoints a few boat lengths apart was programmed and executed.  Remote control of SCOAP, by graduate student Amit Nehra, from control station mounted on GSO skiff. On the second day a series of tests were carried out to demonstrate functionality of all features of the propulsion and power systems and on-board sensors (GPS, compass, AIS, ADCP, weather station). Then an autonomous repeat-transect mission along a ~350-m length transect was designed. Graduate student Amit Nehra coded up the mission commands using the native Searobotics navigation software commands. The mission had five waypoints. When traveling in one direction along the transect, SCOAP operated at 25% thrust (approximately 3 knots or 1.5 m/s) on the first 3 legs (spanning the first 4 waypoints). Then the thrust level dropped to 15% (about 1.5-2 knots) for the final leg, before reaching the endpoint waypoint, where a 30 second station keep period was executed. At the end of the station keep period the entire sequence was repeated in the opposite direction. Several round trips were demonstrated. Each one-way transect was completed in about 5 minutes. The video above shows the final portion of an autonomous transect just prior to a stationkeep period.  Calm morning transiting to operations site. Photo: Amit Nehra. The third culminating day consisted of a ~7 hour execution of the autonomous repeat-transect mission. The purpose was to test reliability of the autonomy and system performance over a relatively longer period, in preparation for future oceanographic data collection missions of duration several days or longer. The mission had to be interrupted twice. Early in the day, the port thruster entered in to an error state two times, but this was resolved by power-cycling the thruster using the RF-linked control station so the mission was resumed after a short delay. Later in the afternoon, as required to test ADCP performance, the mission was intentionally suspended in order to leave the thrusters idle for a short period, then resumed. Vessel navigation, propulsion, power, and sensor data were logged to the fullest extent possible. Attention has now turned to post-deployment analysis. |
|
MILL CREEK MARINA, ALLEN HARBOR, MAY 2013: INITIAL RHODE ISLAND TEST DEPLOYMENT This three-day test deployment sequence accomplished several key project firsts here in Rhode Island. On day one the modified truck hitch arrangement for on-road towing was proven. SCOAP was towed from GSO in Narragansett to Mill Creek Marine, at Allen Harbor in North Kingstown RI.  Truck with trailered SCOAP. Photo: Amit Nehra. There, the hulls were separated--on the trailer--to their on-water operational width (total 18 feet), with three main cross-beams in place. When road-towed the hulls are adjacent to each other, total width 8.5 feet, so that no special markings or accommodations are required; the trailer is a custom design that had recently been modified to enable hull separation by a smaller group (in our case, three able bodies) and the effectiveness of the new design was successfully demonstrated.  Hulls on trailer in adjacent, retracted positions (total width together 8.5 feet). Photo: Geoff Douglass.  Hulls on trailer at full width separation (~18 ft). Photo: Amit Nehra. The second day began with launch in to Allen Harbor at the Mill Creek ramp, which is apparently unique in southern Rhode Island for having both the needed width (20+ feet) and depth (5+ feet). This was the first launch in Rhode Island waters. Using a skiff, with SCOAP systems all off, Mill Creek staff maneuvered the catamaran to their north dock.  Launch on Allen Harbor, North Kingstown, RI, using ramp at Mill Creek Marine. Photo: Amit Nehra. SCOAP was then powered up and systems comprehensively checked. Communications and sensors were all completely functional, including the acoustic Doppler current profiler, the weather station, and the Automatic Identification System tranceiver. Next the diesel generator was started and all its systems and capabilities verified and demonstrated. During the remainder of the day, SCOAP was operated in the harbor (for example, see video clip above) in remote control mode, to gain valuable experience with its thrust and steering responsiveness. Control by both thruster mode (left handheld inputs determine percent thrust, right inputs determine differential thrust) and by heading mode (right inputs instead determine heading angle) was exercised. Station-keep functionality, an autonomous mode, was also demonstrated. After berthing overnight at the north dock, day three consisted of recovery at the Mill Creek ramp, retraction of the hulls on the trailer, and towing back to Narragansett. |